|
四元数(quaternion)最早是为了扩展复数应用而产生与发展起来的,B.P.哈密尔顿早在1843年就在数学中引入了四元数。但是由于当时数学工具所限,其优越性尚显示出来,直到20世纪60年代末这种方法才开始获得实际应用。随着空间技术、计算技术的发展,四元数的优越性日渐引起重视·人们发现四元数也可以作为表现旋转的可选择方法之一应用于手术导航系统中。 手术导航系统[1~3]是在手术过程中,利用计算机技术将术前或术中病人影像数据、实际手术过程中病人的病变体位以及手术工具所在的坐标系统统一起来,根据实际手术的需要对手术工具周围的组织做出相应的显示,对手术进行实时的导航。简单地说,手术导航系统将病人术前或术中影像数据和手术床上病人解剖结构准确对应,手术中跟踪手术器械并将手术器械的位置在病人影像上以虚拟探针的形式实时更新显示,使医生对手术器械相对病人解剖结构的位置一目了然,影像导航可使外科手术更快速、更精确、更安全。 由此可见,定位和空间配准是手术导航系统的关键技术·而在不同坐标系下定位又必然涉及坐标系之间的映射变换·所以本文将详细介绍四元数在手术导航定位系统坐标映射变换中的应用以及四元数在手术导航系统空间配准中的应用。 1坐标变换中的应用 手术导航系统面临的一个关键技术是有关坐标转换的问题,具体可归结为以下描述(如图1所示)。 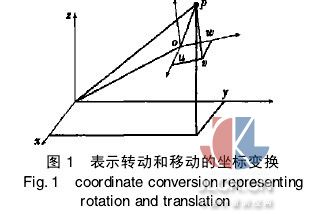
已知:①引导工具端点P在全局坐标系下的位置(x,y,z);②局部参考坐标系的坐标系原点o的位姿,包括坐标原点的位置(ox, oy, oz)及其旋转量的四元数表示值q0, q1, q2, q3·求工具端点P在局部参考坐标系下的位置(u,v,w)。 由机器人学中有关坐标的齐次变换理论[6]可知,要解决此问题关键是坐标映射变换矩阵的确定·坐标映射变换矩阵推导如下: 第一步坐标变换中的旋转量的推导。 定义e为旋转特征向量,以e为旋转轴,旋转角度α,则方向余弦矩阵(即坐标变换中的旋转量)可表示为 
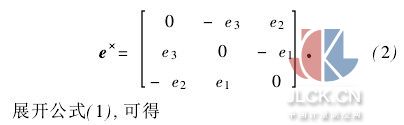

(3) 设方向余弦矩阵Aα的元素为aij,旋转特征向量e的元素可表示为 
根据旋转特征向量和旋转角,定义四元数矢量部分和标量部分如下 

(10) 以上确定了齐次坐标变换中的旋转量。 第二步确定齐次坐标变换矩阵。由机器人学中齐次变换理论可知 
T即为所求的坐标映射变换矩阵。式中ox,oy,oz为坐标原点的位置,亦即局部参考坐标系的移动量。 综上所述,由机器人学中有关坐标的齐次变换理论知,可按式(12)求解  (12) (12)
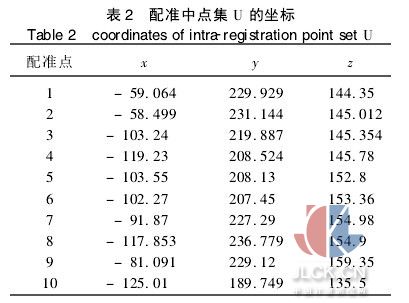
2空间配准中的应用 手术导航系统中,空间配准(registration)主要用于手术前的计划和手术中的处理[7,8]·通过对由位置传感器确定的坐标空间和术前多模态医学图像确定的坐标空间配准,导航系统可以将术前重建所得的虚拟数据与术中空间位置的数据实时地联系起来,这样就消除了医生仅凭主观判断将多模态医学图像与实际手术过程相匹配时可能引起的误差,减小了手术的复杂性和危险性,缩短了手术时间[9]·空间配准是一个坐标空间和另一个坐标空间一对一的映射或变换,即两个不同空间中相对应于同一医学解剖特征的两点之间的映射·空间配准是手术导航系统中的一个十分关键的技术。 下面将详细介绍四元数法在手术导航系统空间配准中的应用·为简化起见,仅研究对应空间点集的配准方法。 2.1配准方法 假设一一对应的两个空间点集U和X的坐标已给定,每个点集有n个点, U={ui,i=0,1,2,…, n}和X={xi,i=0,1,2,…, n},每对点ui,xi有m个坐标ui=(ui1,ui2,…,uim),xi=(xi1,xi2,…,xim)·为了使它们配准起来,就是要找到最优的旋转矩阵R和平移向量T,满足目标表达式 
其中,R是3×3的旋转矩阵;T是3×1的平移矩阵。 关于这个最优问题,可以用基于四元数(quaternions)的非迭代算法,在三维情况下,可以用四元数(三个旋转轴,一个旋转角度)表示R3中的旋转,四元数有如下形式 
(17) 使用四元数表示R3中的旋转,需要计算四个旋转参数和三个平移参数来评估两个点集之间的移动·将这些参数放入一个向量q=[qT,qR]中,qT表示平移向量,qR表示旋转向量·配准的目标表达式就可以转换为式(18),也就使得目标函数f(q)的值最小 
其中,R(qR)表示四元数qR(旋转向量)对应的旋转矩阵 
让tr(C)表示C的迹,就是矩阵对角线的和·定义对称矩阵E为  (20) (20)
最后,用Jacobi方法计算矩阵E的特征值和特征向量。 使目标函数 
达到最小的四元数就是矩阵E的最大特征值所对应的特征向量·qR表示这个向量,最优平移参数为 
两个点集的配准向量为[qT,qR]。 2.2实验结果 配准结果: 四元数qR:[0·363 0·125 -0·30 0·22]; 平移向量qT:[-0·006 55 -0·069 4 0·078 3]误差Fqx:0·32;Fqy:0·24;Fqz:0·078· 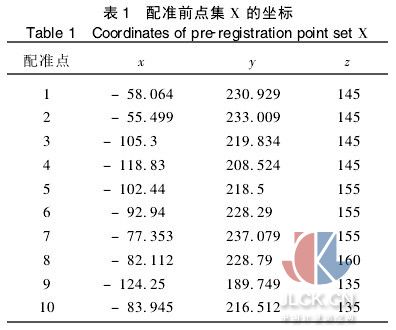
3结语 本文详细介绍了四元数在手术导航定位系统坐标映射变换中的应用以及四元数在手术导航系统空间配准中的应用,详细推导了将一四元数转换为旋转矩阵的过程,进而应用坐标的齐次变换理论解决了手术导航系统中坐标变换的问题,通过基于四元数(quaternions)的非迭代算法的引入,解决了手术导航系统中的又一关键技术空间配准问题,在实际开发的手术导航模体演示系统NEU-IGSS中,上述两项关键技术均得到了成功的应用。 摘自:中国计量测控网
|






